Lenguaje Ensamblador
HISTORIA
Para poder programar en Bajo nivel (Ensamblador) debemos conocer desde lo básico hasta lo más complicado. La primera computadora programable fue la ENIAC en 1946 pero se programaba mediante circuitos complejos que no eran nada funcionales. Después se empezó a utilizar el lenguaje máquina que son claves binaras que representan un código de operación (OPCODE). Estas se almacenan en grupos de instrucciones llamados programas.
Esto llego a ser muy complicado debido a que se debían aprender series enormes de códigos binarios para realizar operaciones. Por ejemplo: Para realizar la suma se tenía una instrucción binaria muy similar a "00101010010100101". Es por eso que se complicaba demasiado manejar este tipo de programación.
Actualmente manejamos lenguajes de Alto nivel que son relativamente sencillos a comparación con el lenguaje máquina. Pero no se llegó al alto nivel desde el código binario, existe un lenguaje que nació para facilitar el binary code. Este se llama "LENGUAJE ENSAMBLADOR".
Los lenguajes ensambladores fueron primero desarrollados en los años 1950, cuando fueron referidos como lenguajes de programación de segunda generación. Por ejemplo, el SOAP (Symbolic Optimal Assembly Program) era un lenguaje ensamblador de 1957 para el computador IBM 650. Los lenguajes ensambladores eliminaron mucha de la propensión a errores y del consumo de tiempo de la programación de los lenguajes de la primera generación que se necesitaba con los primeros computadores, liberando a los programadores del tedio tal como recordar códigos numéricos y cálculo de direcciones.
DEFINICION
Es un lenguaje de programación de bajo nivel para los computadores, microprocesadores, microcontroladores y otros circuitos integrados programables. Implementa una representación simbólica de los códigos de máquina binarios y otras constantes necesarias para programar una arquitectura dada de CPU y constituye la representación más directa del código máquina específico para cada arquitectura legible por un programador. Esta representación es usualmente definida por el fabricante de hardware, y está basada en los mnemónicos que simbolizan los pasos de procesamiento (las instrucciones), los registros del procesador, las posiciones de memoria y otras características del lenguaje. Un lenguaje ensamblador es por lo tanto específico de cierta arquitectura de computador física (o virtual). Esto está en contraste con la mayoría de los lenguajes de programación de alto nivel, que idealmente son portátiles.
Un programa utilitario llamado ensamblador es usado para traducir sentencias del lenguaje ensamblador al código de máquina del computador objetivo. El ensamblador realiza una traducción más o menos isomorfa (un mapeo de uno a uno) desde las sentencias mnemónicas a las instrucciones y datos de máquina. Esto está en contraste con los lenguajes de alto nivel, en los cuales una sola declaración generalmente da lugar a muchas instrucciones de máquina.
Muchos sofisticados ensambladores ofrecen mecanismos adicionales para facilitar el desarrollo del programa, controlar el proceso de ensamblaje, y la ayuda de depuración. Particularmente, la mayoría de los ensambladores modernos incluyen una facilidad de macro (descrita más abajo), y son llamados macro ensambladores.
VENTAJAS Y DESVENTAJAS
- Ventajas
1. Como trabaja directamente con el microprocesador al ejecutar un programa, pues como este lenguaje es el más cercano a la máquina la computadora lo procesa más rápido.
2. Eficiencia de tamaño: Un programa en ensamblador no ocupa mucho espacio en memoria porque no tiene que cargan librerías y demás como son los lenguajes de alto nivel
3. Flexibilidad: Es flexible porque todo lo que puede hacerse con una máquina, puede hacerse en el lenguaje ensamblador de esta máquina; los lenguajes de alto nivel tienen en una u otra forma limitantes para explotar al máximo los recursos de la máquina. O sea que en lenguaje ensamblador se pueden hacer tareas específicas que en un lenguaje de alto nivel no se pueden llevar acabo porque tienen ciertas limitantes que no se lo permite
- Desventajas
Tiempo de programación: Como es un lenguaje de bajo nivel requiere más instrucciones para realizar el mismo proceso, en comparación con un lenguaje de alto nivel. Por otro lado, requiere de más cuidado por parte del programador, pues es propenso a que los errores de lógica se reflejen más fuertemente en la ejecución.
Programas fuente grandes: Por las mismas razones que aumenta el tiempo, crecen los programas fuentes; simplemente requerimos más instrucciones primitivas para describir procesos equivalentes. Esto es una desventaja porque dificulta el mantenimiento de los programas, y nuevamente reduce la productividad de los programadores.
Peligro de afectar recursos inesperadamente: Que todo error que podamos cometer, o todo riesgo que podamos tener, podemos afectar los recursos de la máquina, programar en este lenguaje lo más común que pueda pasar es que la máquina se bloquee o se reinicialice. Porque con este lenguaje es perfectamente posible (y sencillo) realizar secuencias de instrucciones inválidas, que normalmente no aparecen al usar un lenguaje de alto nivel.
Falta de portabilidad: Porque para cada máquina existe un lenguaje ensamblador; por ello, evidentemente no es una selección apropiada de lenguaje cuando deseamos codificar en una máquina y luego llevar los programas a otros sistemas operativos o modelos de computadoras.
Relación del lenguaje ensamblador con los componentes internos del procesador
En la memoria se almacena la información en celdas especiales llamados registros los cuales tienen un nivel alto y un nivel bajo.
Unidad aritmética y lógica es la responsable de realizar como su nombre lo indica operaciones aritméticas y lógicas.
Unidad de control Se encarga de coordinar que los otros componentes ejecuten las operaciones correctamente.
Bus interno son los canales por donde pasa la información que la máquina va a procesar (bus de entrada) o procesada (bus de salida).
REGISTROS DE USO GENERAL
AX = Registro acumulador, dividido en AH y AL (8 bits cada uno).- Interviene en las operaciones aritméticas y lógicas, después de la operación arroja un resultado.
BX = Registro base, dividido en BH y BL.- Se utiliza en transferencias de datos entre la memoria y el procesador.
CX = Registro contador, dividido en CH y CL.- Se utiliza como contador en bucles(LOOP), en operaciones con cadenas(REP), y en desplazamientos(CL).
DX = Registro de datos, dividido en DH y DL.- Se utiliza en operaciones de multiplicación y división junto con Ax y en operaciones de entrada y salida de puertos, su mitad inferior DL contiene el número de puertos.
REGISTROS DE ESTADO
Hay nueve indicadores de un bit en este registro de 16 bits. Los cuatro bits más significativos están indefinidos, mientras que hay tres bits con valores determinados: los bits 5 y 3 siempre valen cero y el bit 1 siempre vale uno.
CF (Carry Flag, bit 0): Si vale 1, indica que hubo "arrastre" (en caso de suma) o "préstamo" (en caso de resta). Este indicador es usado por instrucciones que suman o restan números que ocupan varios bytes. Las instrucciones de rotación pueden aislar un bit de la memoria o de un registro poniéndolo en el CF.
PF (Parity Flag, bit 2): Si vale uno, el resultado tiene paridad par, es decir, un número par de bits a 1. Este indicador se puede utilizar para detectar errores en transmisiones.
AF (Auxiliary carry Flag, bit 4): Si vale 1, indica que hubo "arrastre" o "préstamo" del nibble (cuatro bits) menos significativo al nibble más significativo. Este indicador se usa con las instrucciones de ajuste decimal.
ZF (Zero Flag, bit 6): Si este indicador vale 1, el resultado de la operación es cero.
SF (Sign Flag, bit 7): Refleja el bit más significativo del resultado. Como los números negativos se representan en la notación de complemento a dos, este bit representa el signo: 0 si es positivo, 1 si es negativo.
TF (Trap Flag, bit 8): Si vale 1, el procesador está en modo paso a paso. En este modo, la CPU automáticamente genera una interrupción interna después de cada instrucción, permitiendo inspeccionar los resultados del programa a medida que se ejecuta instrucción por instrucción.
IF (Interrupt Flag, bit 9): Si vale 1, la CPU reconoce pedidos de interrupción externas. Si vale 0, no se reconocen tales interrupciones
DF (Direction Flag, bit 10): Si vale 1, las instrucciones con cadenas sufrirán "auto-decremento", esto es, se procesarán las cadenas desde las direcciones más altas de memoria hacia las más bajas. Si vale 0, habrá "auto-incremento", lo que quiere decir que las cadenas se procesarán de "izquierda a derecha".
OF (Overflow flag, bit 11): Si vale 1, hubo un desborde en una operación aritmética con signo, esto es, un dígito significativo se perdió debido a que tamaño del resultado es mayor que el tamaño del destino.
PROGRAMA ENSAMBLADOR: traduce el lenguaje ensamblador al lenguaje máquina de la CPU


Sintaxis: ETIQUETA DC.t const1, const2,.....

EJEMPLO


Arquitectura von Neumann
var
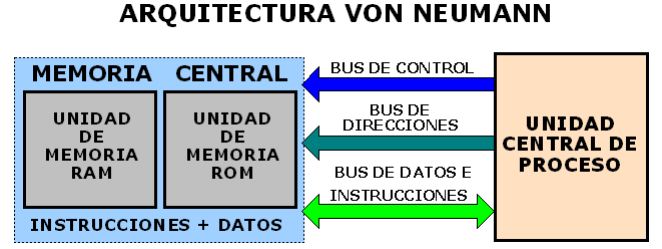
por el ancho del bus que comunica la memoria con la CPU. Así un microprocesador de 8 bits con un bus de 8 bits, tendrá que manejar datos e instrucciones de una o más unidades de 8 bits (bytes) de longitud. Si tiene que acceder a una instrucción o dato de más de un byte de longitud, tendrá que realizar más de un acceso a la memoria.
El tener un único bus hace que el microprocesador sea más lento en su respuesta, ya que no puede buscar
en memoria una nueva instrucción mientras no finalicen las transferencias de datos de la instrucción anterior.
Las principales limitaciones que nos encontramos con la arquitectura Von Neumann son:
- La limitación de la longitud de las instrucciones por el bus de datos, que hace que el microprocesador tenga que realizar varios accesos a memoria para buscar instrucciones complejas.
- La limitación de la velocidad de operación a causa del bus único para datos e instrucciones que no deja acceder simultáneamente a unos y otras, lo cual impide superponer ambos tiempos de acceso
Los ordenadores con arquitectura Von Neumann constan de las siguientes partes:
1) Obtiene la siguiente instrucción desde la memoria en la dirección indicada por el contador de programa y la guarda en el registro de instrucción.
2) Aumenta el contador de programa en la longitud de la instrucción para apuntar a la siguiente.
3) Descodifica la instrucción mediante la unidad de control. Ésta se encarga de coordinar el resto de componentes del ordenador para realizar una función determinada.
4) Se ejecuta la instrucción. Ésta puede cambiar el valor del contador del programa, permitiendo así operaciones repetitivas.
5) Regresa al paso N° 1.